
We’re excited to announce our first major release in nearly a year: MoveIt™ Pro 9.0! We’ve been hard at work rethinking the developer experience: through the UI, through your favorite IDE, and with new LLM approaches. We have also fully removed our remaining dependencies on MoveIt 2 open source, fully switching over to faster, safer, and more optimal implementations which you can read more about here. We continue to deliver the infrastructure that enables robotics companies to move fast in the Physical AI era.
In this update
- Case Study: Motiv Space Systems
- New Features in MoveIt Pro 9.0
- All New Planning & Control Algorithms
- User Interface Facelift
- Meta Quest for AI Data Collection
- End-to-End AI with Diffusion Policies (Beta)
- Enhanced Segment Anything Model Support
- New Teleop Mode: Multi-Joint Jogging
- Enhanced NVIDIA Jetson Orin Support
- Enhanced Scan and Plan Capabilities
- Added Isometric View Modes
Announcing NASA FFR Flight Mission

New Features in MoveIt Pro

All New Planning & Control Algorithms
35x faster IK solvers, 4x faster motion planning and 30x faster cartesian planners. MoveIt Pro 9.0 fully switches over to a suite of new algorithms with more robust and performant implementations replacing OMPL, MoveIt Servo, KDL, and IKFast.See the comparison here.
User Interface Facelift
The new 9.0 UI reduces mouse travel for common workflows, removes confusion around editing while in edit mode, and eliminates wasted space caused by duplicate header bars. The refreshed layout delivers a cleaner, more modern look that improves usability today.

Meta Quest for AI Data Collection
Seamlessly control robots using Meta Quest controllers- build or run the companion Meta Quest APK and stream commands to your one or two armed robots. Command streaming leverages our collision aware planning and admittance controllers, making ML model training data collection safe and hardware agnostic.Learn more.
End-to-End AI with Diffusion Policies (Beta)
Easily train end-to-end models using Diffusion Policies, collecting demonstration data via teleoperation or an ML oracle, then deploying the learned policy into a robotic objective. This powerful integration transforms raw demonstrations into deployable, learned controllers for advanced robotic manipulation.
Enhanced Segment Anything Model Support
New Behaviors added to enable inspecting and filtering bounding boxes and areas of 2D masks. These capabilities are useful for pruning image masks produced by ML behaviors such as automasking.New Teleop Mode: Multi-Joint Jogging
In the teleoperation interface, users can now adjust multiple joint sliders and approve all changes together before execution.
Enhanced NVIDIA Jetson Orin Support
PickNik now builds and tests MoveIt Pro extensively for out of box compatibility with NVIDIA Jetson Orin hardware to ensure compatibility and performance of embedded machine learning workloads. Updated guides for enabling MAXN power mode and GMSL support.Enhanced Scan and Plan Capabilities
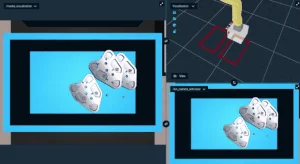
A new set of Behaviors enable scanning point clouds of the real-world and automatically generating rasterized Cartesian tool paths across the contours. This is ideal for spraying, washing, sanding, grinding, and more.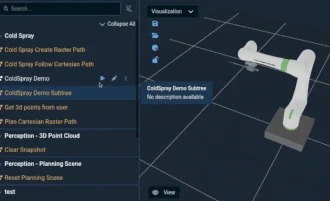
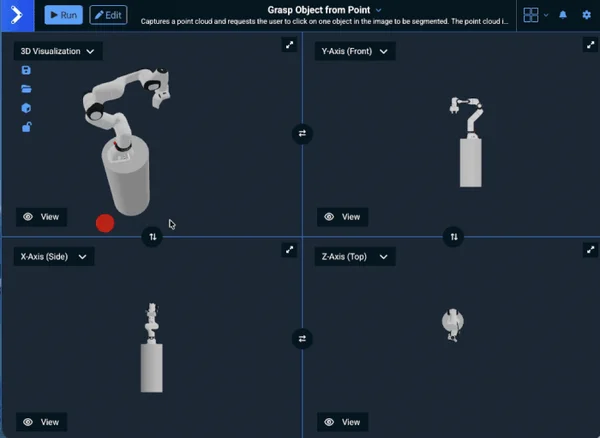
Added Isometric View Modes
Users can now view the robot and scene from multiple perspectives simultaneously (the original 3D "Visualization" view plus 3 new orthographic views along the X, Y, and Z axes). The different views can be selected from the view dropdown menu.Partner Spotlight
Haply Robotics
The Haply Robotics haptic controller is a 6DoF input device designed for high-precision robot teleoperation, and when paired with MoveIt Pro, it enables intuitive, fine-grained control for delicate manipulation tasks. Haply is well suited for precision applications such as assembly and sensitive part handling.
MoveIt Pro is PickNik Robotics’ commercial robotics software platform that extends the capabilities of the open-source MoveIt project. Designed for unstructured environments, MoveIt Pro provides powerful tools for motion planning, grasping, perception, and behavior sequencing. With pre-built robot behaviors and a modular runtime architecture, MoveIt Pro significantly reduces engineering effort and time-to-deployment. Its hardware-agnostic design supports a wide range of commercial and custom robotic arms, making it ideal for scalable automation across space, manufacturing, and logistics sectors.





