Robotics Services
Helping robotics leaders realize their vision with PickNik’s proven processes and experts to overcome the toughest robotics challenges and achieve ambitious results.

Solution Studies
Your vision, goals, and success criteria are the key inputs for our roboticists to dive deep into technical analysis, architecture, feasibility, risk assessment, and delivery milestones for your robotics project. The resulting around 20 page solution study and executive level presentation outlines the mitigation strategies, hardware and software architecture, and a comprehensive plan for the path forward to achieve success.
Discover more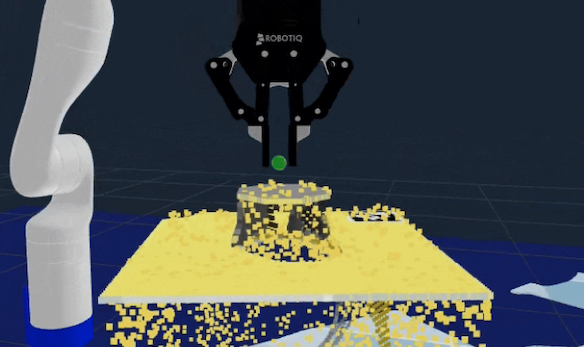
Digital Twin Prototype
If you need to create a MVP or fully functioning pilot quickly and affordably, we’re here to deliver for you. Our expert team, using advanced tools, will work with you to first create digital twins (simulations) of your initial design that enables rigorous testing, reachability analysis, fast debugging, and rapid iterations. Then we implement the beta application on your robot hardware for further testing and debugging. The resulting prototype is ready for demonstrations and field level testing in record time.
Discover more
Application Development
Whether you need support debugging and tuning your application, co-developing a C++ or Python application, or a full turn key robotics solution written from scratch, we’re here to help you be successful. With deep expertise in ROS™, Space ROS, MoveIt and MoveIt Pro, the PickNik team is uniquely qualified to support you in delivering fast results, cost effectively.
Discover more
ROS Driver Development
Whether you need a driver for custom hardware or the driver for your COTS hardware isn’t performing to the level of speed and precision you need, we’re here to help. A sample of the many COTS hardware drivers we’ve worked with includes ABB, HDT, Kinova, Kuka, Robonaut and Universal Robots. Our team has written more drivers than anyone else in the world and we’d love to help with your hardware driver needs.
Discover moreWhatever Development Stage you are in, PickNik is there to help you
End-to-end services and support for production-grade applications
Conceptualization
Prototyping
Productionizing
Deploy & Scale
& Simulation
Lab Prototype
Deployment
Production
Technical Areas of Expertise
Robot Arm Planning
Identification of the best path planning approach
- Motion planning consulting for leveraging the ideal algorithm for a given application and problem type
- Benchmarking competing planning approaches for analytical analysis
- Implementation of novel path planning algorithms and approaches
- Reviewing current robotics literature and academic surveys for cutting edge solutions
- Technology readiness level analysis and reporting for motion planning
Probabilistic/sampling based methods
- MoveIt consulting and development for the popular ROS framework
- Consulting and development of the Open Motion Planning Library (OMPL)
- Multi-query planners including PRM, LazyPRM, PRM*
- Single-query planners including RRT, RRTConnect, RRT*, T-RRT, and LazyRRT
- Asymptotically near-optimal planners including SPARS, SPARS2
- Projection-based methods including EST, KPIECE, AtlasRRT
Other motion planning methods
- Trajectory Optimization (TrajOpt)
- Search Based Planning Library (SBPL)
- Stochastic Trajectory Optimization for Motion Planning (STOMP)
- Covariant Hamiltonian Optimization for Motion Planning (CHOMP)
- Dynamic Motion Primitives
Experience-based motion planning
- Recall and repair of past plans for faster future planning
- More deterministic results
- Experts in Thunder and Lightning algorithms as well as the Bolt framework
Collision Avoidance
Planning around static and dynamic obstacles
- Modeling of static and dynamic environments as “Planning Scenes”
- Collision aware planning using virtual maps of the environment
- Continuous collision checking approaches
- Avoidance of local minimum around obstacles while planning
- Experts with relevant libraries including the Flexible Collision Library (FCL), Bullet, Octomaps, and the Point Cloud Library (PCL)
Inverse Kinematics
Analytic solutions
- Experts in both computationally and manually generated solutions
- Closed-form analytic solutions return complete solutions in microseconds
- 6 degrees of freedom (DOF) and less solvers
- Consultation on mechanical design of robots
Iterative methods
- 7 degrees of freedom or more solvers
- Advice in choosing the best inverse kinematics solvers for your application
- Experts with off-the-shelf open source KDL, LMA, and TracIK solvers
- Customize inverse Jacobian methods, gradient projection method, heuristic method, etc.
- Integrate complex constraints and behaviors in the null space
Multiple arms
- Implementing IK solvers for arbitrary robot configurations with multiple arms and legs
- Support for overlapping (shared) joints such as torsos
- Inverse kinematic solvers that satisfy multiple constraint functions such as stack of tasks and particle swarm optimization
- Motion planning with underconstrained waypoints that iteratively run IK
Realtime Motion Control
Control frameworks
- Integration and customization of the ROS Control Framework
- Creation of custom controllers including position, velocity, and force controllers
- Integration of the OROCOS control framework
Reactive planning
- Fast planners that are able to react and adjust to a changing environment
- Dual mode Cartesian and free-space planning algorithms for a wide range of applications
- System wide performance benchmarking
Grasping and Manipulation
Grasping
- Libraries for generating target grasp poses including MoveIt Grasps and GDP Grasping
- Neural networks for converting camera data to grasp poses
- Pre-Grasp, Grasp, and Post-Grasp evaluation with heuristic pruning
- Overall manipulation pipeline development
Perception and Vision
3D Perception
- PCL Consulting and integration for the Point Cloud Library
- Experience with all kinds of camera hardware (monocular, stereo, depth camera, LIDAR)
- Object detection and image segmentation using deep neural networks
- Simultaneous Localization and Mapping (SLAM)
- Point cloud segmentation, point cloud alignment
- Probabilistic models for visual perception
- Visual-inertial odometry
- Experience with RealSense, Orbbec, and Photoneo depth cameras
- Intrinsic and extrinsic camera calibration
2D Computer Vision
- OpenCV Consulting and integration for the Open Computer Vision Library
- Visual servoing tracking of objects for manipulation
ROS 2 System Design
Software Architecting With ROS
- ROS Consulting and best practices for standard ROS paradigms
- ROS Training for internal development teams new to ROS
- Historical insights into ROS design decisions and ongoing ROS shortcomings
High-quality ROS packages / ROS stacks
- Fully ROS-compliant code repository setup with best practices
- Documented, tested, and code-reviewed deliverables
- Continuous integration scripts and integration testing
- Nvidia GPU-enabled Docker containers for multi-platform support
- ROS 2 C++ style guidelines and ament lint enforcement
ROS 2 Integration
We speak fluent ROS 2
- Expertise in ROS 2 enabling technologies and release status
- MoveIt 2 experts and original authors of MoveIt for ROS 2
- Build your application on the next generation of ROS and future-proof your work
- Utilize industrial-grade features for enterprise systems
- Improved distributed robotic system support
- Quality of service guarantees for tough communication environments
We can convert your code with ease
- Convert your ROS 1 applications and their dependencies to ROS 2
- Migration to DDS, Colcon, Ament, and Managed Nodes
- Develop hybrid ROS 1 and ROS 2 projects with the ros1_bridge
- Close collaboration with the core ROS 2 development team
Mobile base navigation stack
- ROS Navigation stack integration, customization, and deployment
- ROS Navigation consulting for tuning parameters and building custom navigation plugins
- ROS Navigation2 consulting for mobile manipulation and robotics navigation
- Mobile base path and trajectory planning
- OpenSlam's Gmapping, Google Cartographer algorithms for SLAM-based tracking
- ROS-Control framework for switching between simulated and real-world environments
- Simulated Gazebo system of robot base navigation
Simulation and Virtual Reality
Immersive robot visualizations
- Iterate faster on hardware by testing new designs virtually before physical prototyping
- Deploy high situational awareness teleop environments
- Use ROS, Gazebo, and Rviz with off-the-shelf 3D headsets like the HTC Vive and Oculus Rift
- Evaluate and plan your collaborative robot integration strategy in virtual reality
- Run Unity3D on Windows or Linux
Robot Modelling
Assembly modelling
- Setup Solidworks assembly files to have proper mechanical mates and joint limits
- Setup coordinate systems for DH parameterization
- Create Interface Control documents for consistent representation of the robot's kinematics
URDF generation
- Convert CAD files to compliant URDF specifications
- Verification of joint limits and appearance in Rviz
- Integrate inertial properties for simulation in Gazebo
- Integrate actuator and controller properties for ROS Control
Mesh collision optimization
- Defeature and reduce mesh complexity
- Reduce triangle count on meshes
- Create bounding convex decompositions of meshes
- Convert to coarse grain geometric primitives for highest speed optimizations
CAD packages
- Solidworks
- OnShape
We are currently compatible with the following CAD packages:
Workspace Analysis
Reachability and usability studies
- Analysis of robot base placement with respect to workspace
- Determine starting poses for various tasks
- Reachability Maps
- Optimal arm placement
Multilingual
Multilingual robots
- C/C++ for high performance cross-platform code
- Python: Wrap existing C/C++ functionality in the most common ROS scripting language
- Matlab: Prototype new algorithms or use codegen to run your code in C as a standalone app
Cloud Integration
Amazon Robomaker and Microsoft Azure cloud integration
- Easily develop and deploy robotic fleets at scale
- Remote monitoring, logging, and control
- Improved cloud-based visual and speech recognition
- Simulation service to accelerate application testing
Web-based Robot Control
Modern platform-agnostic front-ends
- Develop React and Python apps to your robotic system
- Leverage the latest web standards and technologies
- Remote monitoring via video feeds and full situational awareness
- Connecting to ROS via rosbridge
Expertise
Learn more about MoveIt Pro's areas of expertise









