Ready to Get Started?
Get in touch with our experienced team to explore how MoveIt Pro can meet your specific mobile manipulation development needs.
Industry Leading Robotic Application Platform
Operating multiple arms in close proximity has historically been difficult with traditional robotic arms because of the complexity of safely coordinating and timing them. By contrast, MoveIt Pro has the automatic capability to prevent collisions between two or more manipulators.
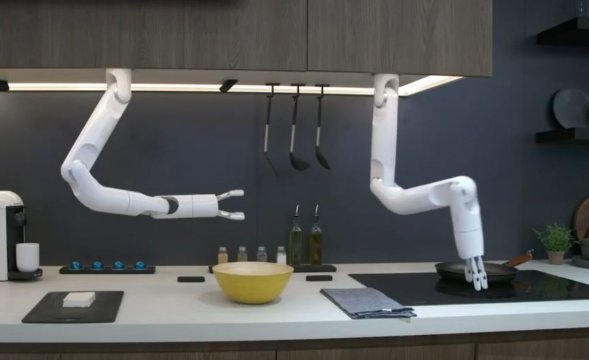
With the MoveIt Pro Robotics Application Platform, customize your multi-arm solution to your precise needs using pre-built skills & Behaviors, or custom C++ and Python extensions. This allows you to achieve the ideal blend of quick prototypes and tailored solutions.
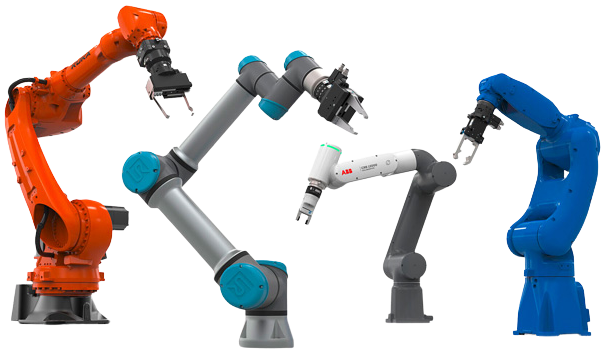
MoveIt Pro works with any brand of robot hardware or sensor - only ROS compatibility required.
Need to build custom hardware? MoveIt Pro can provide the full control stack.



Commanding each arm's trajectory separately, one at a time. But not at the same time.
Moving all the arms them together in some Cartesian relative fashion without collision.
This allows for two arms to work together to lift or place a sufficiently heavy or awkward object one arm by itself would not be able to do.
Moving all the arms together in some free space or Cartesian trajectory without collision.
This is usually a Cartesian trajectory to allow for two arms to work together to lift or place a sufficiently heavy or awkward object one arm by itself would not be able to do.
Moving Arm 1 in a free space or Cartesian trajectory, then moving Arm 2. Arm 2 should defer to Arm 1 and ensure its planned path will not cause a collision with Arm 1.
This could be free space trajectories, for faster object picking cycle time, or Cartesian trajectories, for faster surfacing task cycle time.
Get in touch with our experienced team to explore how MoveIt Pro can meet your specific mobile manipulation development needs.





