We help companies deploy AI to robot arms quickly.
Build unique manipulation applications on our MoveIt™ Pro platform, enabling you to deploy production-ready Physical AI.





MoveIt Pro helps customers launch 12-24 months earlier


MoveIt Pro Robotics Application Platform

Library of 200+ pre-built skills
for computer vision, ML, grasping, and motion control

We take care of the infrastructure,
patching regressions in robotics dependencies like ROS™ and NVIDIA

Ships with powerful developer tools
for training ML models, debugging, and simulation
INTELLIGENT DECISION MAKING
AI Opens New Use Cases
Advanced ML vision and dynamic path planning let your team automate tasks that previously required manual human labor.
See Case Studies
OPEN PLATFORM
One Platform - Unlimited Applications
Support for any type of hardware - through ROS or extensible APIs to develop custom plugins.
Hardware Partners Ecosystem
RAPID DEVELOPMENT
Launch Robotic Applications Fast
Succeed where others have failed. Speed up your team's time to value with modern, production-grade software for advanced manipulation.
Prototypes & Digital TwinsLoved by robotics experts around the globe
“MoveIt Pro has enabled our team to rapidly prototype manipulation demonstrations using our space-rated robotic arms, and has been valuable for exploring operations concepts for future space missions.”
“MoveIt Pro is the best piece of robotics software I have used. The work that has been put into solving the time consuming problems and the library of existing work to draw from has accelerated our work - we have completed tasks in 10% of the time it would've taken without MoveIt Pro!”

“Partnering with PickNik was a strategic decision that brought not only advanced technology but also a team of dedicated experts into our development process.”
“There are few others in the industry of robotics with the capability of PickNik, especially capabilities as expansive as their abilities with dexterous manipulator control.”
“Working with PickNik meant we didn’t have to reinvent the robotics stack. We could focus on what mattered — solving the sanitation problem — while MoveIt Pro gave us the power to move fast and iterate quickly.”

“We initially turned to PickNik for MoveIt Pro, and the software has been excellent. What truly exceeded our expectations, however, was the depth of knowledge and expertise of their team. PickNik has proven to be a true partner in our success.”
“To accelerate the launch of our industrial humanoid, 3Pro, Rapid Robotics is deploying mobile manipulation software from PickNik Robotics. MoveIt Pro has hundreds of AI-enabled skills allowing us to fast-track development.”
“MoveIt Pro's UI is an excellent implementation of the visual programming paradigm, and helps make complex trees of behaviors understandable.”
Marketplace
A curated collection of reusable MoveIt Pro Behaviors, example simulated robots, and supported hardware that help teams build, test, and deploy faster.
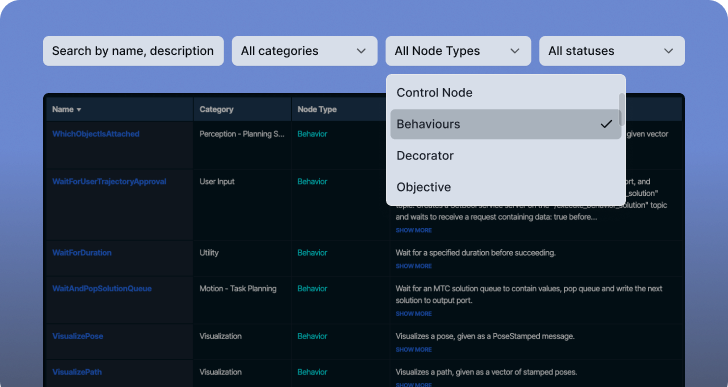
Behaviors Hub
Explore the Behaviors skills library to discover ready‑to‑use AI, planning, manipulation, and perception behaviors.
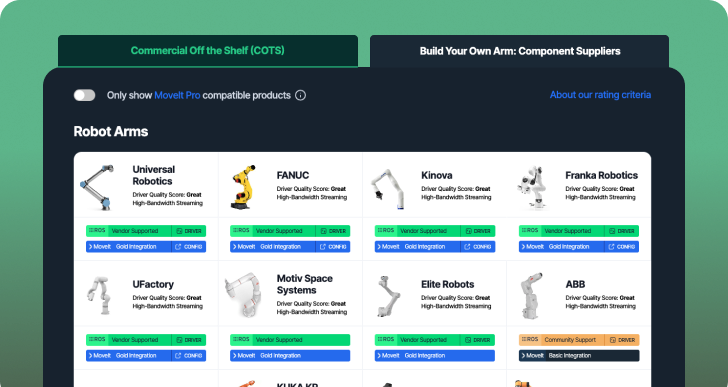
Compatible Hardware
Hardware that has Gold or Basic support with MoveIt Pro out of the box, as well as a database of ROS 2 support for the whole industry.
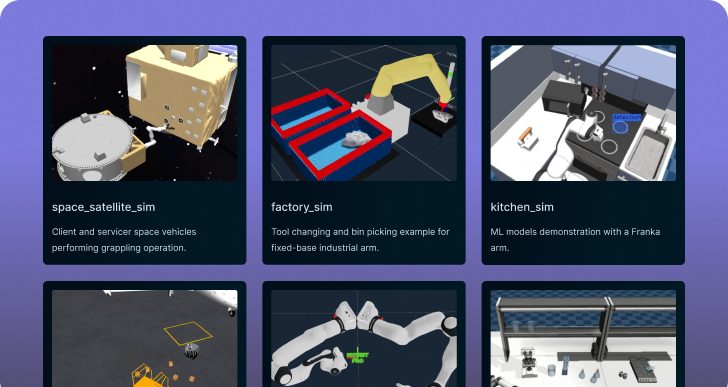
Reference Applications
MoveIt Pro ships with 8+ example “robot configs” that you can explore to get you started.
×





