Real-time C++ and Python manipulation libraries with minimum dependencies.
Contact Us
ADVANCED CONTROLS
REAL-TIME SAFE
CERTIFIABLE
Originally developed for the US Space Force and NASA as part of the MoveIt™ Pro Application Platform, these modules have since been made standalone for tighter integration into certain kinds of applications including:
Healthcare
Military
Space Flight
Industrial
Oil & Gas
Key Features
- Select only the modules you need
- Speed up your verification and validation efforts
- Optimized for deployment in safety critical applications
We closely partner with you to ensure your philosophy of development is incorporated in, including process checks, requirements documentation, and providing source code.
 Extensive unit testing
Rigorous compliance checkers
Real-time safe memory management
Extensive unit testing
Rigorous compliance checkers
Real-time safe memory management
Available Core Modules
MoveIt Pro is ideal for most commercial applications, and uses the same core modules under the hood. However certain domains have specialized requirements that we offer this barebones product for.
MoveIt Pro User Interface
Application Platform, Behavior Tree Editor, Robot Visualizer, Debug Tools
MoveIt Pro Runtime
Behavior Trees, Objectives, Behaviors, ROS™, Simulation
MoveIt Pro Core
Real-time C++ Libraries, Solvers, Planners,
and Controllers
Currently Available Algorithms
Controllers |
||
VFCHybrid Cartesian Velocity Force Controller |
JTACJoint Trajectory Admittance Controller |
JVCJoint Velocity Controller |
Inverse Kinematics Solvers |
||
VelocityIKDifferential Inverse Kinematics Solver IK solver for velocities |
PathIKPath Inverse Kinematics Planner IK solver for paths |
PoseIKPose Inverse Kinematic Solver IK solver for poses |
Planners |
||
Pro RRTFree Space Motion Planner with Collision Checking |
PoseJogCollision aware servoing, based on VFC |
Pro Planning SceneManager of 3D world knowledge |
Other Robotics Components |
||
Collision Checking 1Detect and avoid obstacles |
Robot State 1Core robotics data types |
Robot Model 1Core robotics data types |
Other Components
- Task Planning (MTC): Wrappers for PoseIK, PathIK, and ProRRT
Not Included
- Perception, grasp generation, ML integration, support for MoveIt 2
Other Non Real-time Libraries
Verification and Validation Specifications
The following technical specifications are based on generic robotic arm requirements. Additional requirements gathering is generally necessary before we can provide a final list of specifications.
| Compliance Metrics |
|
| Automated Testing |
|
| Real-time Safe |
|
| V&V |
|
| Operating System |
|
| Target Hardware |
|
| API References | |
| Planning Frameworks |
|
| Source Code |
|
| Multi- Threading |
|
| Lines of Code |
|
| Compiled Size |
|
| Distribution |
|
| Python API |
|
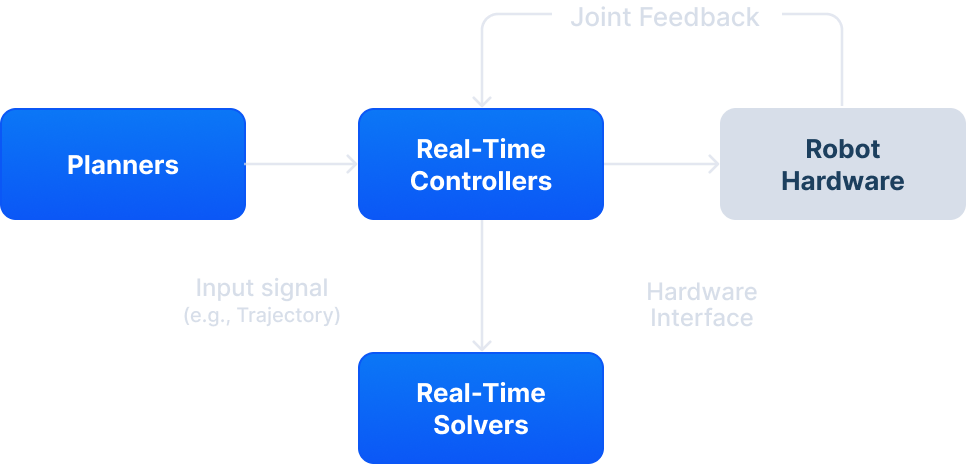
Real-Time Control and Safety
MoveIt Pro's controllers produce robot commands inside a real-time control loop running at hundreds of cycles per second, with motion planning and task logic layered above it. Every control cycle, they verify motion remains within bounds and otherwise bring the robot to a controlled stop.
Safety Checks While the Robot Moves
- Trajectory execution is monitored against the commanded path and goal, and aborts if deviation becomes excessive.
- Force-compliant motion aborts when the measured force or torque exceeds a configurable limit.
- Streamed (teleoperation) motion halts automatically if commands stop arriving, and the controller predicts and prevents joint-limit overruns.
- Every stop is a controlled deceleration within configured limits, never an abrupt cut or a release of the joints.
- Non-finite (NaN/Inf) values from commands, sensors, or hardware are caught at every boundary and stop the robot rather than reaching the actuators. (Available in 9.4 and later.)
Engineered and Tested for Production
- The real-time controllers are written to follow MISRA C++:2023 guidelines.
- The control loop is allocation-free, and that property is enforced by automated tests on every build, not just asserted.
- Every change must pass code review and test gates, both automated and manual, before it can be merged.
- MoveIt Pro is validated across multiple operating systems and CPU architectures (x86-64 and Arm64).
- System behavior is validated continuously in high-fidelity simulation and on reference hardware.
Clear Safety Boundaries
MoveIt Pro's software checks reduce risk in normal operation but do not replace functional safety. MoveIt Pro is not a safety-rated system: emergency stop, safe-state-on-fault, and real-time-loop monitoring come from the robot hardware, its driver, and the installation's safety chain.
Computer Vision Capabilities
MoveIt Pro contains these higher level capabilities; talk to us about exposing them in MoveIt Pro Core:
Machine Learning Models
Point Cloud Perception
RGB
Perception
Camera Calibration
×





