We’re excited to announce a new and easier way to build Behavior Trees in MoveIt Pro using an experimental LLM integration. As of version 8.8 there is a built-in text prompt directly in the UI, that instantly generates complete Behavior Trees and refactors existing ones. This dramatically accelerates the creation of Objectives, reducing setup time and making it easier to prototype, maintain, and deploy complex robotic workflows.
In this update
- Case Study: CleanBotix
- New Features in MoveIt Pro
- Bin picking reference application
- Allow multi-chain robot control with the JTAC
- Support for Franka FR3 Arm
- Visual highlighting for ports with matching values
- Easier robot setup command line interface
- Keyboard shortcuts for faster workflows
- MoveIt Pro 8.0 cheat sheet
Case Study: CleanBotix’ Rosie sanitation robot
Read More.

New Features in MoveIt Pro
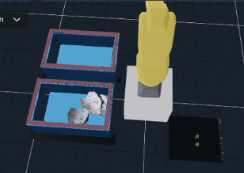
Bin picking reference application
Two new pick and place Objectives have been added to the factory_sim robot configs, as easy to use reference applications. They demo examples of picking automotive brackets from a bin using a CAD model, placing them precisely on a jig using force compliance, and then picking and dropping them in another bin.Allow multi-chain robot control with the JTAC
Multi-chain admittance is now supported in the Joint Trajectory Admittance Controller (JTAC), enabling advanced force-based control for robots with multiple tips and kinematic chains. Learn more.
Support for Franka FR3 Arm
You can now integrate the 7‑DoF Franka Research 3 arm directly using our hardware setup guide. From mounting the arm and initializing via the Franka Desk interface— MoveIt Pro Behavior Trees, Objectives, and Behaviors work faster and more reliably. Learn more.Visual highlighting for ports with matching values
Do you want to better see how your port variables and data flows through your Behavior Tree? Automatic port highlighting makes this easier to see visually!
Easier robot setup command line interface
The moveit_pro new config and moveit_pro update_acm commands allow you to quickly create robot configuration packages from a template and generate the Allowed Collision Matrix (ACM). This simplifies the process of setting up a new robot, automatically setting up the proper file structure and dependencies.Keyboard shortcuts for faster workflows
Speed up your workflow with new keyboard shortcuts for common actions like opening, saving, undo/redo, and navigating the interface—making it easier than ever to edit Objectives, Behaviors, and Behavior Trees.
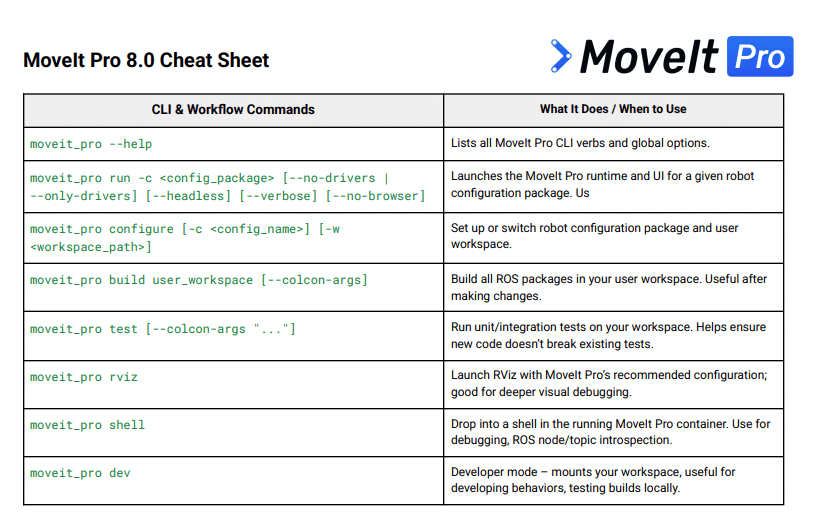
MoveIt Pro 8.0 cheat sheet
With release 8 we introduced a concise guide to the most-used commands, workflows, and tips for MoveIt Pro.MoveIt Pro is PickNik Robotics’ commercial robotics software platform that extends the capabilities of the open-source MoveIt project. Designed for unstructured environments, MoveIt Pro provides powerful tools for motion planning, grasping, perception, and behavior sequencing. With pre-built robot behaviors and a modular runtime architecture, MoveIt Pro significantly reduces engineering effort and time-to-deployment. Its hardware-agnostic design supports a wide range of commercial and custom robotic arms, making it ideal for scalable automation across space, manufacturing, and logistics sectors.





