The pace of advancement in AI and machine learning is reshaping what’s possible in commercial robotics, especially for robotic arms and manipulation. Whether it’s segmenting cluttered scenes, planning dexterous grasps, or executing fine manipulation in the real world, today’s models are pushing robots into new industries. But with these breakthroughs come new engineering challenges—particularly for teams tasked with turning promising research into reliable deployments. MoveIt™ Pro is built for this transition. It empowers robotics teams to use the latest ML advancements with deterministic control, while maintaining a focus on performance, safety, and maintainability.
Built for ML-Driven Robotics
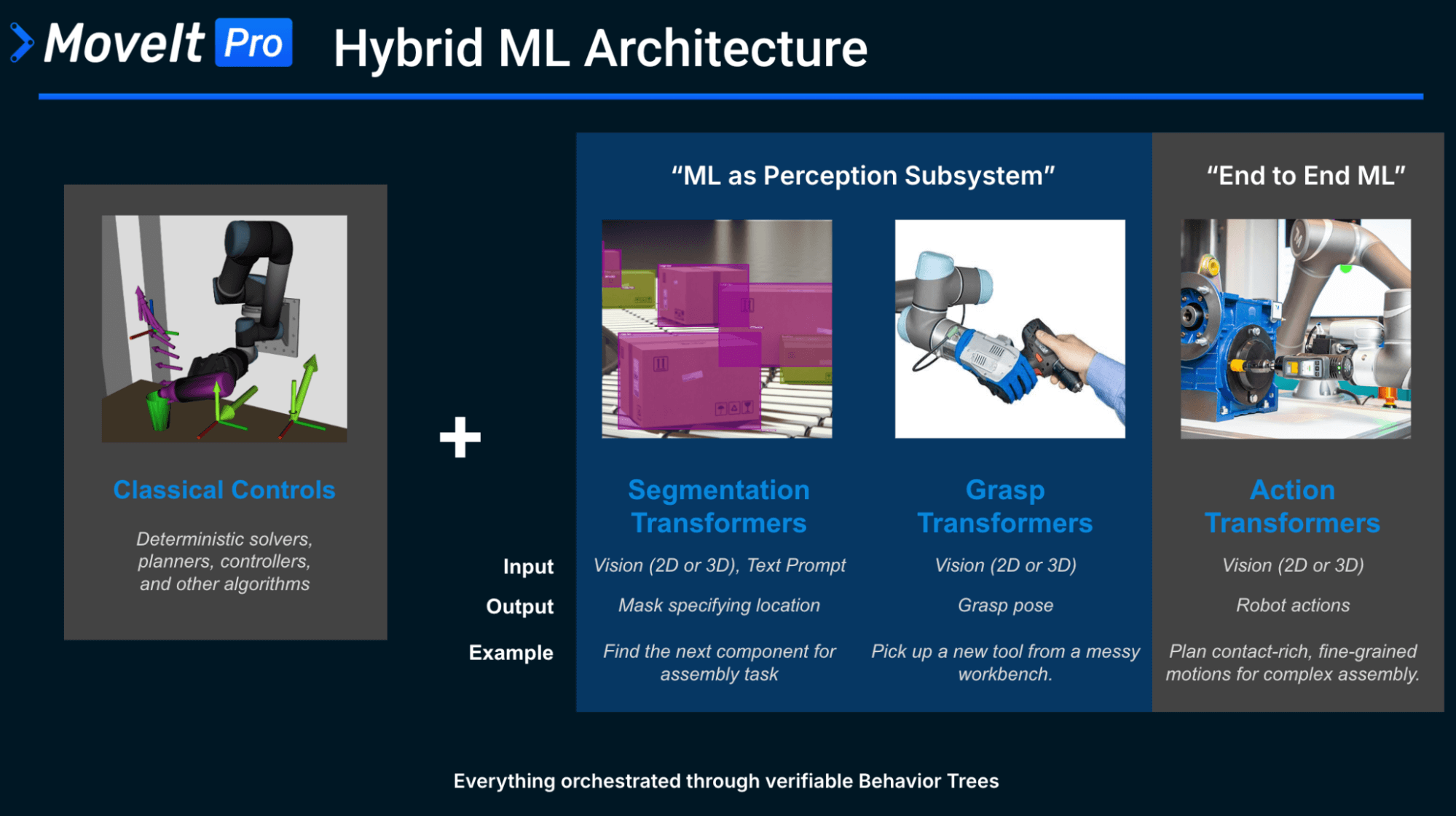
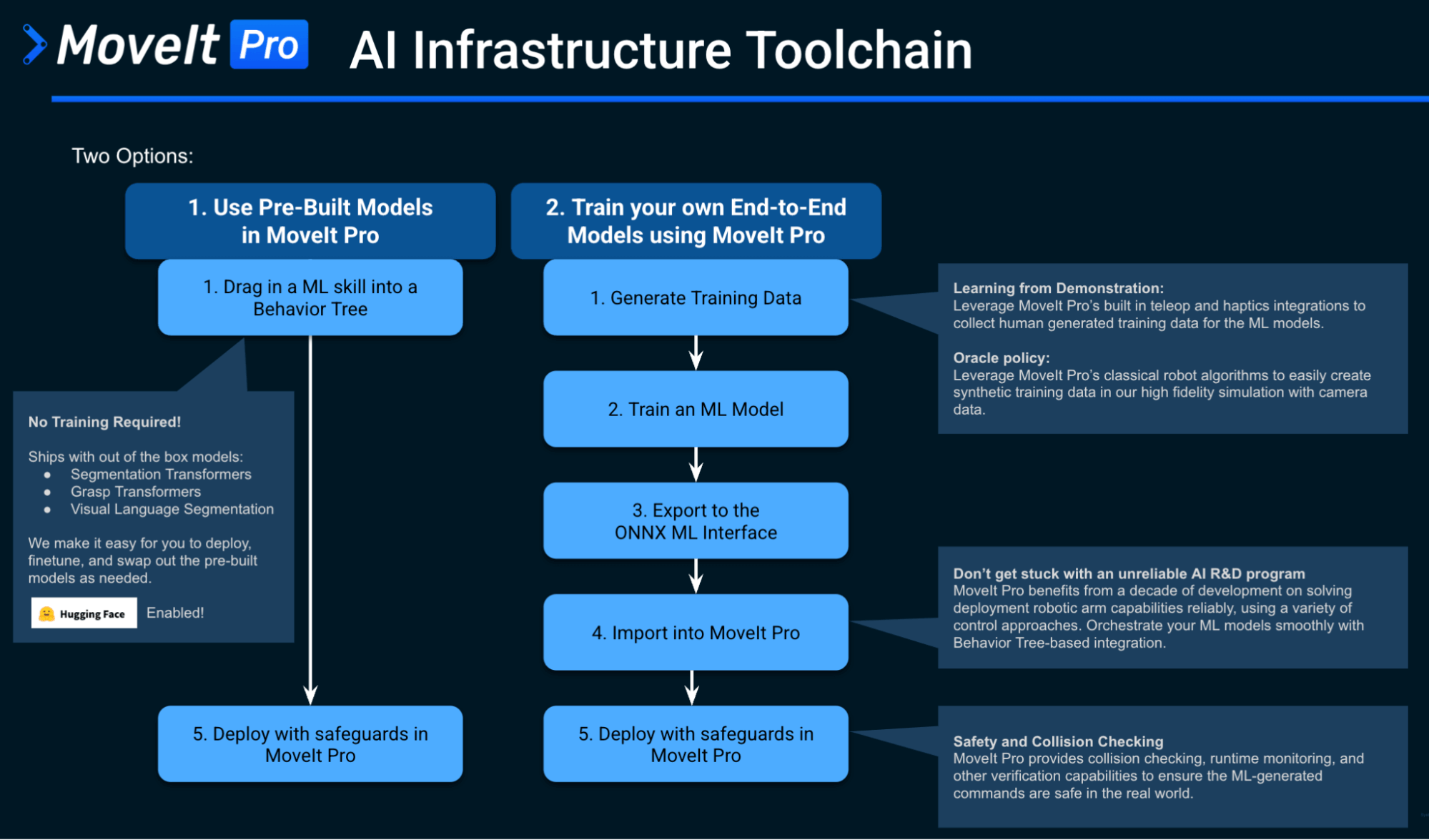
At its core, MoveIt Pro supports emerging models like segmentation transformers, grasp transformers, and action transformers—all within a system built to handle real-time constraints. These models open powerful new Behaviors for robots, but their practical use still falls into a familiar development arc: model setup, model refinement, and model deployment. MoveIt Pro simplifies and accelerates each of these stages by providing infrastructure tailored specifically for robotics.
ML Training Infrastructure
In the model training phase, engineering teams often lose valuable time dealing with environment mismatches, especially when managing CUDA drivers, Python versions, and ML frameworks. MoveIt Pro eliminates this class of error by shipping as a self-contained Docker container, pre-configured for GPU acceleration. For teams developing or testing models on the host, it includes developer-friendly DDS configurations that allow native Python processes to communicate cleanly with the robot system. MoveIt Pro uses a Behavior Tree framework to manage all internal logic and includes boilerplate Behaviors to quickly incorporate custom models. This enables teams to rapidly integrate and iterate without building complex glue code. Internally, MoveIt Pro supports parallelism in Behavior Trees to improve responsiveness and throughput when dealing with high-frequency perception and control loops.
Model Verification and Refinement
Once a model is functional, the refinement phase becomes critical when testing on real hardware. MoveIt Pro provides a structured and safe environment for evaluating model outputs, such as grasp candidates or action trajectories. Using input from 2D masks and pointclouds, MoveIt Pro generates 3D collision objects and uses deterministic controls to evaluate the feasibility of candidate predications in real time. This lets teams identify viable actions before committing hardware, minimizing the risk of runtime collisions. Developers can also scale trajectory speed to slowly test new logic before committing to full-speed execution.
Debugging and Observability
Observability is another major aspect of refinement. MoveIt Pro visualizes perception inputs and model outputs—including bounding boxes, camera feeds, and collision geometry—alongside the planning scene using Rviz and other ROS™-compatible tools. The platform includes logging Behaviors to record images, pointclouds, and trajectory results, which can be used for training data or debugging. For supervised autonomy workflows, MoveIt Pro supports breakpoints, operator confirmations, and trajectory previews that allow human oversight to remain in the loop. It also includes full-body teleoperation capabilities, so experts can demonstrate task execution directly on the robot, all while the system ensures collision-free operation. These demonstrations, whether simulated or physical, can be recorded in the efficient MCAP format for later analysis or training.
ML Deployment to Hardware
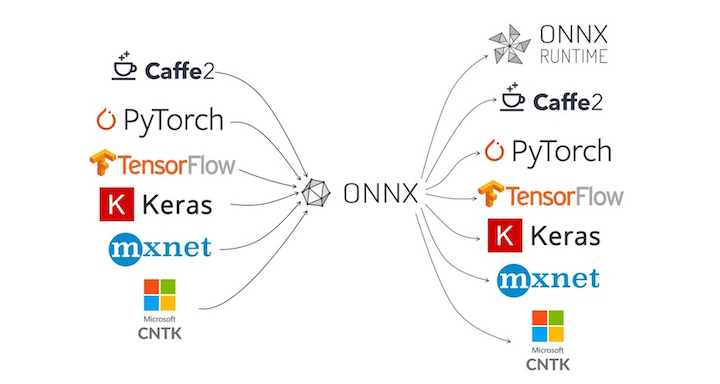
Finally, in the deployment phase, MoveIt Pro helps bridge the gap from prototype to production. ML model execution is managed through ONNX integration, with inference nodes built directly into the Behavior Tree architecture. The platform includes ready-to-run implementations of common ONNX models like SAM2, Learning to Grasp (L2G), and diffusion policies, while also allowing teams to use their own custom models. CUDA passthrough support ensures these models run at native GPU speed inside the containerized runtime, avoiding version conflicts with the host system. MoveIt Pro includes detailed setup guides for both single-computer deployments using RT_PREEMPT and CUDA, and multi-computer setups using DDS for distributed computation.
Summary
By reducing integration friction, improving observability, and ensuring deployment reliability, MoveIt Pro transforms ML models from research demonstrations into production tools. For engineering managers balancing innovation speed with system safety, MoveIt Pro offers a way to move faster without cutting corners.
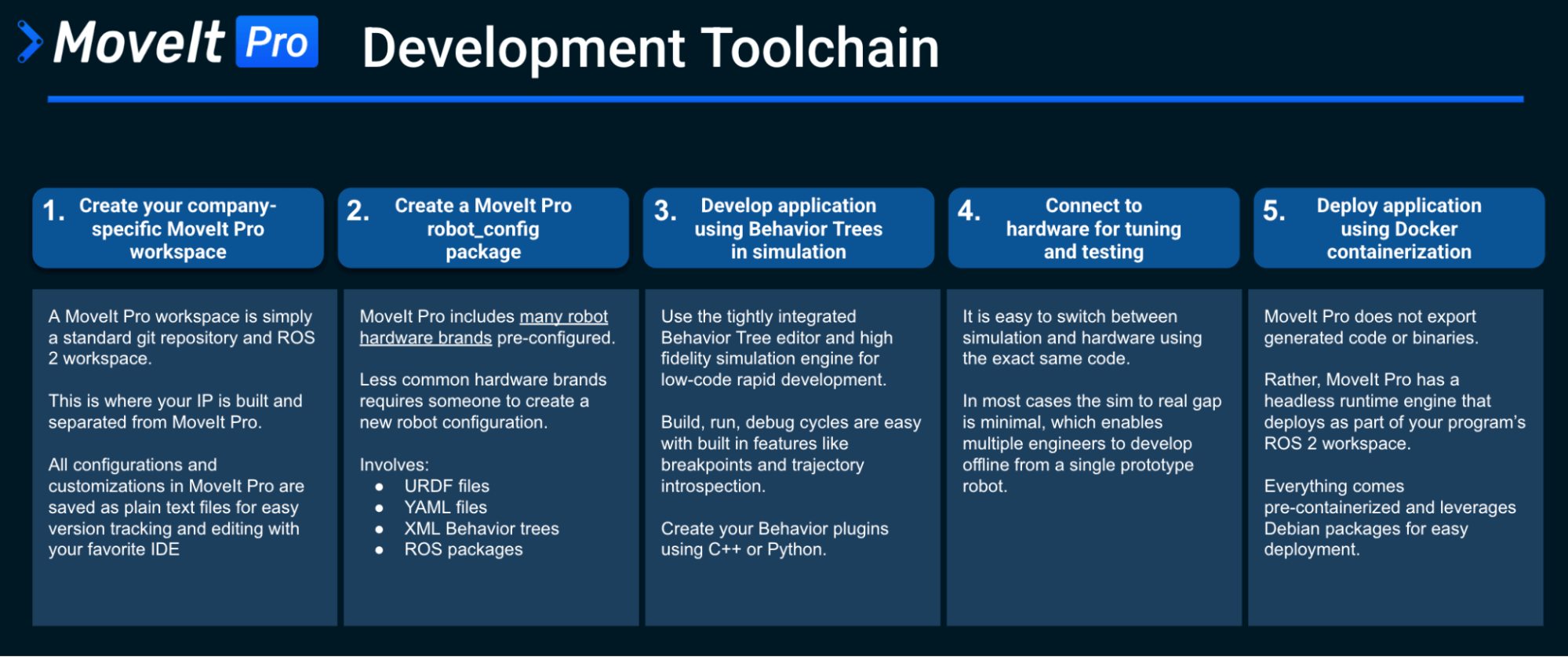
MoveIt Pro is PickNik Robotics’ commercial robotics software platform that extends the capabilities of the open-source MoveIt project. Designed for unstructured environments, MoveIt Pro provides powerful tools for motion planning, grasping, perception, and behavior sequencing. With pre-built robot behaviors and a modular runtime architecture, MoveIt Pro significantly reduces engineering effort and time-to-deployment. Its hardware-agnostic design supports a wide range of commercial and custom robotic arms, making it ideal for scalable automation across space, manufacturing, and logistics sectors.





