Seamless Integration of Whole-Body-Based Mobile Manipulation and Navigation with MoveIt™ Pro
Executing whole-body-based mobile manipulation tasks within a defined workspace is straightforward with MoveIt Pro, but real-world applications often require movement across larger environments. Whether navigating to another station in a warehouse or repositioning in a remote, unstructured setting, MoveIt Pro provides a robust solution by integrating navigation and manipulation into a single framework.
MoveIt Pro supports mobile navigation through a set of dedicated Nav2 integration Behaviors, which allow robots to execute standard navigation tasks such as pose-based goal navigation and path following. These Behaviors extend MoveIt Pro’s Objective-based framework, enabling users to design workflows that incorporate both motion planning and navigation within the same system. This ensures a modular, reusable, and scalable approach to whole-body-based mobile manipulation, where movement and task execution are seamlessly coordinated.
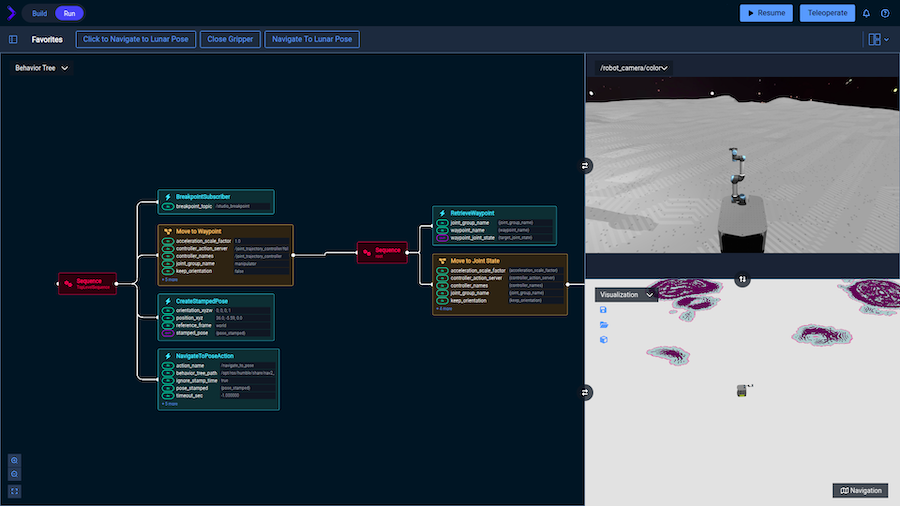 Using MoveIt Pro, you can easily make Objectives that move the arm using Moveit2 and move the base using Nav2
Using MoveIt Pro, you can easily make Objectives that move the arm using Moveit2 and move the base using Nav2
Enhanced Visualization and Interfacing
To improve situational awareness and debugging, MoveIt Pro provides visualization of key navigation data within its UI, including:
- Occupancy maps for environmental awareness
- Costmaps (global and local) for obstacle avoidance
- Global paths for trajectory planning
This built-in visualization aids in real-time monitoring and fine-tuning of mobile manipulation operations, ensuring safe and efficient execution.
 In the MoveIt Pro UI, you have the ability to click on the costmap to generate a path to that point using Nav2
In the MoveIt Pro UI, you have the ability to click on the costmap to generate a path to that point using Nav2
Standardized Action Server Integration
MoveIt Pro interfaces with Nav2 using standard action server requests, allowing users to integrate their existing navigation stack without extensive modifications. This means that a mobile manipulator with an established navigation pipeline can be immediately operational within MoveIt Pro, leveraging its existing path planning capabilities while benefiting from MoveIt Pro’s high-level task orchestration.
For applications that demand long-range whole-body-based mobile manipulation, MoveIt Pro provides an integrated framework that combines navigation, perception, and manipulation into a cohesive workflow. This enables developers to deploy robust and adaptive robotic solutions across complex, large-scale environments while maintaining a structured and maintainable software architecture.
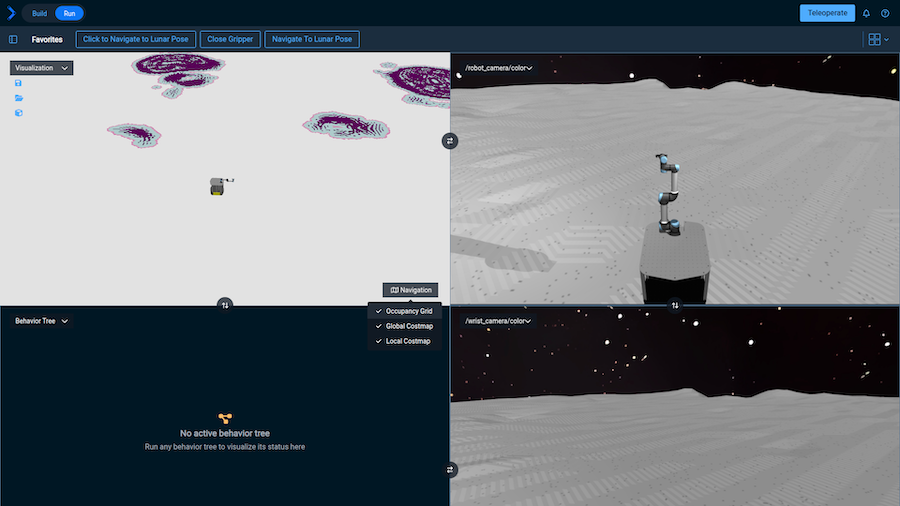 In the Moveit Pro UI, you can choose to visualize the different costmaps and occupancy maps that Nav2 publishes
In the Moveit Pro UI, you can choose to visualize the different costmaps and occupancy maps that Nav2 publishes
MoveIt Pro is PickNik Robotics’ commercial robotics software platform that extends the capabilities of the open-source MoveIt project. Designed for unstructured environments, MoveIt Pro provides powerful tools for motion planning, grasping, perception, and behavior sequencing. With pre-built robot behaviors and a modular runtime architecture, MoveIt Pro significantly reduces engineering effort and time-to-deployment. Its hardware-agnostic design supports a wide range of commercial and custom robotic arms, making it ideal for scalable automation across space, manufacturing, and logistics sectors.





